


中国科学院中国科学技术大学微纳米工程实验室吴东教授领导的研究团队提出了一种飞秒激光二合一写入多材料的加工策略,制造出了由温敏水凝胶和金属纳米颗粒组成的
近年来,飞秒激光双光子聚合技术作为一种具有纳米精度的真三维加工方式,已被广泛应用于制造各种功能微结构。这些微结构在微纳光学,微传感器和微机器系统等领域展现出广阔的应用前景。然而,如何利用飞秒激光实现复合多材料加工,并进一步构建具有多模态的微纳机械仍极具挑战。
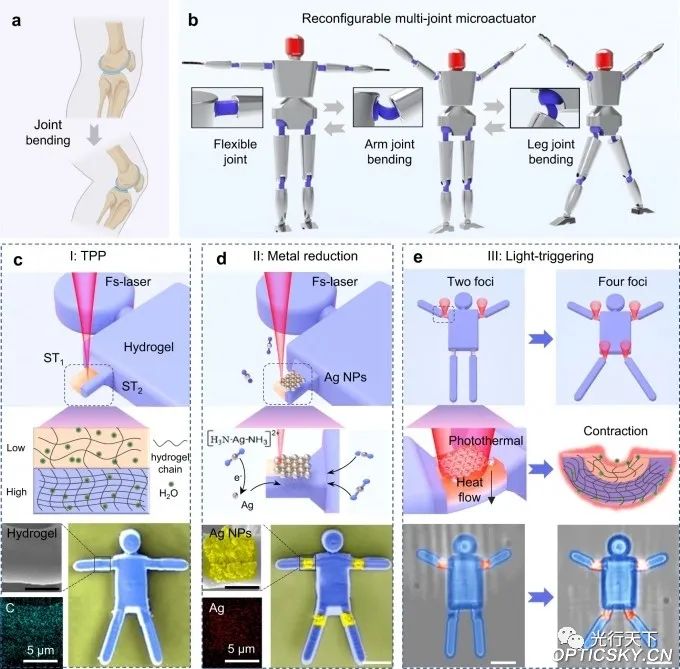
研究人员介绍,飞秒激光二合一加工策略包括使用不对称双光子聚合构建水凝胶关节以及在关节局部区域激光还原沉积银纳米颗粒。其中,非对称光聚合技术使水凝胶微关节局部区域的交联密度产生各向异性,最终使其可以实现方向和角度可控的弯曲变形。原位激光还原沉积可以在水凝胶关节上精确加工银纳米颗粒。这些银纳米颗粒具有很强的光热转换效应,使多关节微机械的模态切换表现出超短响应时间和超低驱动功率的优异特性。
作为一个典型的示例,八个微关节被集成在一个人形微机械上。随后,利用空间光调制技术在3D空间内实现多焦点光束,进而精确地刺激每一个微关节。多个关节之间的协同变形促使人形微机械手完成多个可重构的变形模态。最终,在微米尺度下实现了“舞动的微机器人”。作为概念验证,研究人员通过设计微关节的分布和变形方向,双关节微型机械臂可以对同向和异向的多个微颗粒进行收集。
研究人员表示,飞秒激光二合一加工策略可以在各种三维微结构局部区域构建可变形的微关节,实现多种可重构的变形模态。未来,具有多种变形模态的微机械手将在微型货物收集、微流体操作和细胞操纵方面展现广阔的应用前景。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

个移动轨道配置- 控制是三相单极对四相双极- 我的机械手 (mBot) 使用 4 个磁铁并且不悬浮- 对于
微操作已在许多应用领域得到了应用,特别是在纳微米级的定位系统中,要求传感器能检测出微小的力和位移的信息。目前用于微位移检测的原理较多,如光学式、磁和电感式、电容式和压电式等,但这些大多不便用于
人工智能 AI 正在加快速度从云端走向边缘,进入到越来越小的物联网设备中。而这些物联网设备往往体积很小,面临着许多挑战,例如功耗、延时以及精度等问题,传统的
个简单的硅光电电路所组成,从本质上来说,主要是躯干和大脑,以及四个电化学执行器用来执行腿的功能。当
能识别我指定的瓶子,并把它从A位置移动到B位置,关键是如何识别呢,不是很清楚,求大神指点!在此感激不尽!
总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
个信号,或多或少,有各种类型的信号可以被处理,例如:模拟信号,数字信号,频率信号等等,图像基本上只是
对误差的分析与研究最终目的都是为了通过各种方法与技术来消除或者降低这些误差带来的影响,而误差补偿技术则是用来消除或者降低位姿误差而得到广泛应用的
利用神经网络算法(如图1所示)来教计算机识别模式的技术。这可以推广到各种应用程序,包括对象识别和自然语言处理。图1。
还可以根据人工智能技术制定的原则纲领行动。 1920年捷克作家卡雷尔·查培克在其剧本《罗萨姆的万能
联合会(InternationalFederationofRobotics,IRF)的定义,服务
外伤人;6.增压装置:当现场气源压力不高,或不稳定时,可选用增压装置,可提高气源工作压力,保证机床
定位方案主流方案效果循线根据电磁线行走存在路线固定的问题纯视觉室内相似场景较多,存在重定位问题纯
制作教程 midt-bot前言材料清单模型拼装下位机上位机总结前言看上了稚晖君的X-bot项目,瞬间被这个小巧精致的
已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认线年,很多人爱它们只是处于好奇心。在2012年,
已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认线
建立在直角X,Y,Z[1] 三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。桁架式
机械部分采用遥控汽车,造型时尚,色彩华丽,车上装配的火炬有“2008奥运”标志,内部七彩电子火焰
便携工作站:如图。····· 我已经学过C语言,但其他都没怎么学过,专业课也才刚刚开始,请问我现在需要在网上学习什么? 我在这个项目里负责程序·······
SKYLAB专注于GNSS模块,WiFi模块,蓝牙模块以及组合型模块!除去订制品,SKYLAB现有两款标准蓝牙WiFi
使用的相同。在伸展位置,Thor 高约 625 毫米,可以举起高达 750 克的负载。该项目的主要目的是设计
系统中的各种模块之间需要进行分布实时的通信+传统的网络设计方法无法满足其严格的空间,成本等要求-基于局域网CAN设计了
早些时候,哈佛研究人员展示了受折纸技艺启发的可编程气球方案。现在,密歇根大学的一支研究团队,也开发出了
像小说《科学怪人》中弗兰肯斯坦的 “怪物” 苏醒过来一样,在一块计算机芯片大小的硅晶圆片上并排放置的数万个
近日,来自伦敦帝国理工学院的Molly M. Stevens教授团队基于微流控和浸渍密封(MLDS)技术实现了可填充
由于其体积小巧、运动灵活以及各种原位治疗的潜力而受到了极大的关注。然而,除了精确的运动控制之外,
下一篇:运动雕塑模型

关注微信公众号